

torch.optim.lr_scheduler:调整学习率
本文是笔者在学习cycleGAN的代码时,发现其实现了根据需求选择不同调整学习率方法的策略,遂查资料了解pytorch各种调整学习率的方法。主要参考:https://pytorch.org/docs/stable/optim.html#how-to-adjust-learning-rate
模块提供了一些根据epoch训练次数来调整学习率(learning rate)的方法。一般情况下我们会设置随着epoch的增大而逐渐减小学习率从而达到更好的训练效果。
而则提供了基于训练中某些测量值使学习率动态下降的方法。
学习率的调整应该放在optimizer更新之后,下面是一个参考蓝本:
注意: 在PyTorch 1.1.0之前的版本,学习率的调整应该被放在optimizer更新之前的。如果我们在 1.1.0 及之后的版本仍然将学习率的调整(即 )放在 optimizer’s update(即 )之前,那么 learning rate schedule 的第一个值将会被跳过。所以如果某个代码是在 1.1.0 之前的版本下开发,但现在移植到 1.1.0及之后的版本运行,发现效果变差,需要检查一下是否将放在了之前。
为了了解lr_scheduler,我们先以为例了解一下优化器(所有optimizers都继承自类):
语法:
参数:
- params (iterable):需要优化的网络参数,传进来的网络参数必须是(官网对这个参数用法讲的不太清楚,下面有例子清楚的说明param具体用法)。
- 如果优化一个网络,网络的每一层看做一个parameter group,一整个网络就是parameter groups(一般给赋值为),补充一点,函数返回的parameter groups实际上是一个变成了generator的字典;
- 如果同时优化多个网络,有两种方法:
- 将多个网络的参数合并到一起,当成一个网络的参数来优化(一般赋值为或);
- 当成多个网络优化,这样可以很容易的让多个网络的学习率各不相同(一般赋值为)。
- lr (float, optional):学习率;
- betas (Tuple[float, float], optional) – coefficients used for computing running averages of gradient and its square (default: (0.9, 0.999));
- eps (float, optional) – term added to the denominator to improve numerical stability (default: 1e-8);
- weight_decay (float, optional) – weight decay (L2 penalty) (default: 0);
- amsgrad (boolean, optional) – whether to use the AMSGrad variant of this algorithm from the paper On the Convergence of Adam and Beyond (default: False)。
两个属性:
- optimizer.defaults: 字典,存放这个优化器的一些初始参数,有:, , , , 。事实上这个属性继承自父类;
- optimizer.param_groups:列表,每个元素都是一个字典,每个元素包含的关键字有:, , , , , ,类是各个网络的参数放在了一起。这个属性也继承自父类。
由于上述两个属性都继承自所有优化器共同的基类,所以是所有优化器类都有的属性,并且两者字典中键名相同的元素值也相同(经过lr_scheduler后就不同了)。
下面是用法示例:
输出为:
注意:
lr_scheduler更新optimizer的lr,是更新的optimizer.param_groups[n][‘lr’],而不是optimizer.defaults[‘lr’]。
torch.optim.lr_scheduler中大部分调整学习率的方法都是根据epoch训练次数,这里介绍常见的几种方法,其他方法以后用到再补充。
要了解每个类的更新策略,可直接查看官网doc中的源码,每类都有个方法,定义了更新策略。
语法:
更新策略:
n
e
w
_
l
r
=
λ
×
i
n
i
t
i
a
l
_
l
r
new\_lr = \lambda imes initial\_lr
new_lr=λ×initial_lr
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
i
n
i
t
i
a
l
_
l
r
initial\_lr
initial_lr是初始的学习率,
λ
\lambda
λ是通过参数lr_lambda和epoch得到的。
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- lr_lambda(function or list):根据epoch计算 λ \lambda λ的函数;或者是一个的这样的function,分别计算各个parameter groups的学习率更新用到的 λ \lambda λ;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
注意:
在将optimizer传给scheduler后,在shcduler类的方法中会给列表中的那个元素(字典)增加一个的元素表示初始学习率,等于。
下面举例说明:
输出:
下面解析关键行:
第1~3行
一些包。
第7~13行
简单定义一个网络类,并没有实现网络应有的功能,只是用来定义optimizer的。
第15行
实例化一个网络。
第17行
实例化一个对象。
第18行
实例化一个对象。是根据epoch更新lr的函数。
第20行
打印出初始的lr。保存的是初始的参数。
第22~28行
模仿训练的epoch。
第25~26行
更新网络参数(这里省略了)。
第27行
打印这一个epoch更新参数所用的学习率,由于我们只给optimizer_1传了一个,所以长度为1。
第28行
更新学习率。
补充:
cycleGAN中使用实现了前个epoch用为学习率,之后的个epoch线性衰减lr,直到最后一个epoch衰减为0。详情参考:https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix/blob/master/models/networks.py的第52~55行。
语法:
更新策略:
每过个epoch,做一次更新:
n
e
w
_
l
r
=
i
n
i
t
i
a
l
_
l
r
×
γ
e
p
o
c
h
/
/
s
t
e
p
_
s
i
z
e
new\_lr = initial\_lr imes \gamma^{epoch // step\_size}
new_lr=initial_lr×γepoch//step_size
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
i
n
i
t
i
a
l
_
l
r
initial\_lr
initial_lr是初始的学习率,
s
t
e
p
_
s
i
z
e
step\_size
step_size是参数,
γ
\gamma
γ是参数。
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- step_size(int):每训练step_size个epoch,更新一次参数;
- gamma(float):更新lr的乘法因子;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
下面举例说明:
输出为:
语法:
更新策略:
每次遇到中的epoch,做一次更新:
n
e
w
_
l
r
=
i
n
i
t
i
a
l
_
l
r
×
γ
b
i
s
e
c
t
_
r
i
g
h
t
(
m
i
l
e
s
t
o
n
e
s
,
e
p
o
c
h
)
new\_lr = initial\_lr imes \gamma^{bisect\_right(milestones, epoch)}
new_lr=initial_lr×γbisect_right(milestones,epoch)
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
i
n
i
t
i
a
l
_
l
r
initial\_lr
initial_lr是初始的学习率,
γ
\gamma
γ是参数,
b
i
s
e
c
t
_
r
i
g
h
t
(
m
i
l
e
s
t
o
n
e
s
,
e
p
o
c
h
)
bisect\_right(milestones, epoch)
bisect_right(milestones,epoch)就是bisect模块中的函数,返回值是把epoch插入排序好的列表milestones式的位置。
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- milestones(list):递增的list,存放要更新lr的epoch;
- gamma(float):更新lr的乘法因子;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
下面举例说明:
输出为:
语法:
更新策略:
每个epoch都做一次更新:
n
e
w
_
l
r
=
i
n
i
t
i
a
l
_
l
r
×
γ
e
p
o
c
h
new\_lr = initial\_lr imes \gamma^{epoch}
new_lr=initial_lr×γepoch
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
i
n
i
t
i
a
l
_
l
r
initial\_lr
initial_lr是初始的学习率,
γ
\gamma
γ是参数.
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- gamma(float):更新lr的乘法因子;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
下面举例说明:
输出为:
语法:
更新策略:
让lr随着epoch的变化图类似于cos:
n
e
w
_
l
r
=
e
t
a
_
m
i
n
+
(
i
n
i
t
i
a
l
_
l
r
?
e
t
a
_
m
i
n
)
×
(
1
+
c
o
s
(
e
p
o
c
h
T
_
m
a
x
π
)
)
new\_lr = eta\_min + (initial\_lr-eta\_min) imes (1+cos(\frac{epoch}{T\_max}\pi))
new_lr=eta_min+(initial_lr?eta_min)×(1+cos(T_maxepoch?π))
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
i
n
i
t
i
a
l
_
l
r
initial\_lr
initial_lr是初始的学习率,
e
t
a
_
m
i
n
eta\_min
eta_min是参数表示最小学习率,
T
_
m
a
x
T\_max
T_max是参数表示cos的周期的1/4。
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- T_max(int):lr的变化是周期性的,T_max是周期的 1 4 \frac{1}{4} 41?;
- eta_min(float):lr的最小值,默认为0;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
下面举例说明:
输出结果过长不再展示,下面展示lr的变化图:
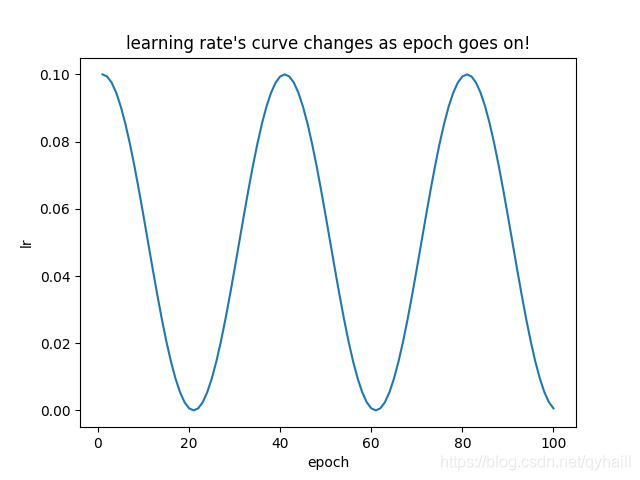
可以看到lr的变化类似于cos函数的变化图。
不依赖epoch更新lr的只有。
语法:
更新策略:
给定一个metric,当metric停止优化时减小学习率。
n
e
w
_
l
r
=
λ
×
o
l
d
_
l
r
new\_lr = \lambda imes old\_lr
new_lr=λ×old_lr
其中
n
e
w
_
l
r
new\_lr
new_lr是得到的新的学习率,
o
l
d
_
l
r
old\_lr
old_lr是上一次优化使用的学习率,
λ
\lambda
λ是通过参数。
参数:
- optimizer (Optimizer):要更改学习率的优化器;
- mode(str):只能是或,默认:
- 模式下,当metric不再下降时减小lr;
- 模式下,当metric不再增长时减小lr;
- factor(float):lr减小的乘法因子,默认为0.1;
- patience(int):在metric停止优化个epoch后减小lr,例如,如果,那metric不再优化的前两个epoch不做任何事,第三个epoch后metric仍然没有优化,那么更新lr,默认为10;
- verbose(bool):如果为,在更新lr后一个更新信息,默认为;
- threshold (float) – Threshold for measuring the new optimum, to only focus on significant changes. Default: 1e-4.
- threshold_mode (str) – One of rel, abs. In rel mode, dynamic_threshold = best * ( 1 + threshold ) in ‘max’ mode or best * ( 1 - threshold ) in min mode. In abs mode, dynamic_threshold = best + threshold in max mode or best - threshold in min mode. Default: ‘rel’.
- cooldown (int) – Number of epochs to wait before resuming normal operation after lr has been reduced. Default: 0.
- min_lr (float or list) – A scalar or a list of scalars. A lower bound on the learning rate of all param groups or each group respectively. Default: 0.
- eps (float) – Minimal decay applied to lr. If the difference between new and old lr is smaller than eps, the update is ignored. Default: 1e-8.
下面举例说明:
输出为:


